Using Rack and Pinion Gears for Steering a Robot
By Julia Byrd
October 17th, 2021
October 17th, 2021
After my last experiment in using rack and pinion gears, I was googling and noticed a picture of a rack and pinion gear for a car. So I wanted to use one to steer some wheels.
I used the blue wheels and the large rack gear. It took some trial and error to figure out how to connect the rack to the wheel.

Connecting both wheels, I noticed that it would wiggle a lot and I needed a) something to push against, and b) hold the rack up in place.

I added a regular beam to the other side. I should be able to use the blue regular beam to connect the wheels to the robot frame. By holding one part of the steering mechanism in place I can use that to push against and hold the pinion gear.

I'm also experimenting with which way the rack gear works better - rack up, pointing out or rack down, pointing in. This picture shows rack up, pointing out. Now I need to create a frame that holds the wheels, rack and pinion, and a motor.

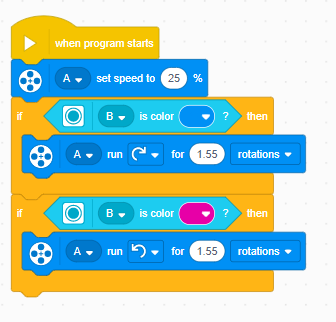
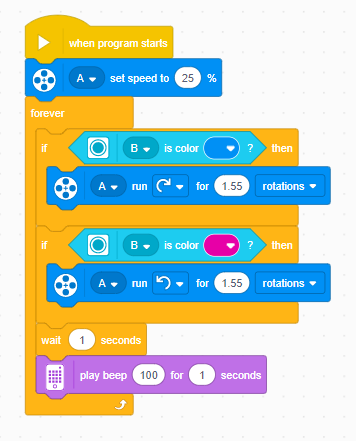
This setup seemed to work okay. I reused my motor turning code to check it.



I also noticed the hub doesn't fit too well on top. There is also a lot of space. Time for a re-do.


This looks like it will work okay. The wheels tilt side to side by two holes. The L piece helps push the rack against the pinion. The challenge now is mounting it onto a frame. And figuring out how to make it drive.