By Stella E.

Friday, December 9, 2016
Coopertition
Integration
By: Lauren K.
To our team integration mean that we apply skills from robotics into everyday life. For example, Stella works in the library. A few days ago there was a girl who was sad and she helped her to be happy. I learned that it is important to respect others and be nice to them, so I have worked hard at being nicer and more respectful to my brother.
Discovery
By Stella E.
Discovery
To me discovery is beginning with the end in mind by focusing and understanding the big rocks to create a plan. Our team used this core value a lot at the beginning of the season. We discovered that communication and leadership are important.
Puppy Training Boot Camp Project
By Jonathan E. and Donovan B.

For blind people, seeing eye dogs are their eyes
to help them do tasks that the rest of us take for granted. Picking up
something that fell on the floor. Avoiding a car about to cross the crosswalk.
Not running into aisles and displays in the store. Finding a seat in a
restaurant. Finding the door just to walk into a store. Seeing eye dogs are
truly a companion in a world of darkness. There are many, many blind people who
want and need seeing eye dogs, including those in our community, but cannot get
one because there are not enough seeing eye dogs raised each year.
Students from the Bowmar Robotics team worked to
help with this problem. They organized a “Puppy Training Boot Camp” to help
inform our community about Gallant Hearts, a local non-profit seeing-eye dog
training organization. Gallant Hearts raises seeing-eye dogs for the blind, and
they provide them free of charge. However, it takes a lot of money to raise and
train a seeing-eye dog.
There are two effective ways our community can
help. First, sign up for a corporate donation program such as AmazonSmile and
Kroger Community Rewards. These programs do not cost us, the customer,
anything, but they are a great source of funds. Second, be a puppy training
family. Seeing-eye dogs start out life as puppies in training. Gallant Hearts
will pay for their food and veterinarian care. All you need to do as a family
is to love and care for the puppy and help socialize them so they get used to
going to lots of different environments. After 18 months you have to give up
the puppy so that the puppy can be trained and become a seeing-eye dog for a
blind person in need.
The Puppy Training Boot Camp was held at
PetSense last Saturday. We want to thank Rhonda Henley at PetSense, Becky Floyd
of Gallant Hearts, May (Becky’s guide dog), and Lindsey Jordan of Vicksburg Dog
Obedience Classes, and all the people who helped to put it on, as well as all
of the people who signed up for the community rewards programs.
If you would like to donate, the links for the
corporate donation programs are: http://smile.amazon.com/ and https://www.kroger.com/account/enrollCommunityRewardsNow. You can also donate directly to Gallant Hearts by visiting http://gallanthearts.org/contact-gallant-hearts/. Your support will truly help someone in need.
Gallant Hearts is a non-profit charity that has
helped countless blind people have a companion who helps them have a new window
into the world we take for granted. Helping Gallant Hearts will help numerous
blind people feel and be more able. Please donate today and consider being a
puppy training family!

Game Day Checklist
By Aaron B.
Here is my checklist for things to bring to the competition:
Here is my checklist for things to bring to the competition:
- Robot (charge it the night before!)
- Robot charging cord, USB cord
- Attachments
- Cart, if using one
- Core Values Board and any materials
- Project Presentation Materials
- Robot Design Materials
- Buttons or other give-aways
- Buttons or give-aways for judges
- Costume needs
- Extension cords, surge protectors (sometimes the venue has power available, sometime not.)
- Lego building sets (can keep in car if you are feeling confident)
- Drinks/snacks (they'll buy all the sugary stuff, so bring something non-sugary)
- Lunch $
- Camp chairs (at least for adults!)
- Laptop w/ power cord (for last minute tweaking of programs)
- Spare AA batteries w/ battery cover for EV3 (in case something goes really wrong with your battery, which has happened to us before.)
- Team paperwork
- Check for competition fee
- Tote to store jackets, etc., under table
- Signage/decoration for table
- Frisbee/football/etc. to play with at lunch time. Keep in car until lunch.
Thursday, December 1, 2016

Donate to Gallant Hearts
By Jonathan E.
Donate to Gallant Hearts by clicking on this link: Gallant Hearts
You can also donate to Gallant Hearts by signing up to Amazon Smile or Kroger Community. Every time you buy something a small piece of your payment goes to Gallant Hearts AT NO EXTRA COST!!!!! That goes for both programs.
Go to Amazon Smile to sign up.
Go to Kroger Community Rewards to sign up.
You are doing a good thing by donating to Gallant Hearts. You are funding a program that helps disabled people be normal. It will make them so happy. The money helps raise dogs. The dogs then go on to help blind people be happy and normal.
When you sign up to either of the programs, be sure to donate to Gallant Hearts when prompted with a choice to ensure your money makes it to Gallant Hearts.
Donate to Gallant Hearts by clicking on this link: Gallant Hearts
You can also donate to Gallant Hearts by signing up to Amazon Smile or Kroger Community. Every time you buy something a small piece of your payment goes to Gallant Hearts AT NO EXTRA COST!!!!! That goes for both programs.
Go to Amazon Smile to sign up.
Go to Kroger Community Rewards to sign up.
You are doing a good thing by donating to Gallant Hearts. You are funding a program that helps disabled people be normal. It will make them so happy. The money helps raise dogs. The dogs then go on to help blind people be happy and normal.
When you sign up to either of the programs, be sure to donate to Gallant Hearts when prompted with a choice to ensure your money makes it to Gallant Hearts.
Pushing Mechanism
By Mateo B. and Stella E.
This mechanism can push easily if you add something to the front.
Get the parts: a large motor, 4 black friction pegs, a 15 hole connector, a large gear (black), a small gear (black), 2 red axle pegs, at least a size 6 axle piece, an axle piece with a stopper on it, 2 size 3 axles, 2 connector pieces (axle and hole pieces), a 2 hole piece and axle connector, a 2 axle connector and a 1 hole connector piece, a 5 hole connector, and 2 loose gray pegs.


Get these from your supplies: a small black gear and an axle piece with a stopper on it and a large motor.

Put here : as shown in the picture.

Get these from your supplies: a 15 hole connector and two black friction pegs.

Assemble them like this:

Get these from your supplies:

Assemble them like this:

Get these from your supplies: A large black gear, a size 3 axle, and a connector.

Assemble them like this:

Get these: A 5 hole connector, an axle-hole connector hybrid, and 2 loose pegs

Assemble them like this:

Put them together like this:

Get these:

Put these together:

Put them like this:

Put these together:

Put these on:

Get this: (can be longer)

Put it on like this:



Overview
This mechanism can push easily if you add something to the front.
Step 1
Get the parts: a large motor, 4 black friction pegs, a 15 hole connector, a large gear (black), a small gear (black), 2 red axle pegs, at least a size 6 axle piece, an axle piece with a stopper on it, 2 size 3 axles, 2 connector pieces (axle and hole pieces), a 2 hole piece and axle connector, a 2 axle connector and a 1 hole connector piece, a 5 hole connector, and 2 loose gray pegs.


Step 2
Get these from your supplies: a small black gear and an axle piece with a stopper on it and a large motor.

Step 3
Put here : as shown in the picture.

Step 4
Get these from your supplies: a 15 hole connector and two black friction pegs.

Step 5
Assemble them like this:

Step 6
Get these from your supplies:

Step 7
Assemble them like this:

Step 8
Get these from your supplies: A large black gear, a size 3 axle, and a connector.

Step 9
Assemble them like this:

Step 10
Get these: A 5 hole connector, an axle-hole connector hybrid, and 2 loose pegs

Step 11
Assemble them like this:

Step 12
Put them together like this:

Step 13
Get these:

Step 14
Put these together:

Step 15
Put them like this:

Step 16
Put these together:

Step 17
Put these on:

Step 18
Get this: (can be longer)

Step 19
Put it on like this:

FINAL PRODUCT:

Alternative Implementations

Problems with gripping, turning, and going over things
By Mateo B.
Today we discovered a problem with our robot. It was not turning very well at all. The wheels would keep slipping. So we tested it and found out that we needed to put more weight on the wheels. We changed our robot so that it was smaller and the center of gravity was just in front of the wheels.
We worked out the math that showed us what was wrong. The center of gravity was towards the front of the robot, which made the driving wheels have very little weight on them. Here is how you can figure this out for your robot.
The first thing to do is measure the distance between the wheels. We call this distance "L". Next, measure the distance from the back wheel to the center of gravity between the wheels. We call this distance "L_b". The ratio of these two numbers tells us a lot of information about how the robot will grip and roll over objects.

Once you have these two numbers you can use them in the fraction portion of the equation below.

As an example, say your "L" is 10 spaces and the center of gravity is roughly 2 spaces in front of the back wheels (L_b). The ratio for how much of the weight of the robot is on the back wheels is (1-2/10), or 0.8, which is 80%. The higher that percentage, the more grip your robot has. The problem with our last robot design was that we were at 30%. This left 70% on the front wheels, which made it very difficult to turn and to roll over things. We changed our robot design so that now it is at roughly 90% of the weight on the back wheels without an attachment, and 80% to 85% with an attachment on the front.
The equation shows us how there are four degrees of freedom for making the robot turn better. First, the "alpha" parameter is the coefficient of friction. (Coefficient means the number stuck on front of another number. It makes it smaller or bigger.) The coefficient of friction means how "sticky" or "slippery" the wheel is on the mat. The higher the coefficient of friction, the better. This number usually goes from 0 to 1 (for example, ice would be a small number, like 0.1. Concrete would be higher, like 0.8.) You can change the coefficient of friction by using tape on the wheels to get the dirt and dust off.
The second degree of freedom is the weight of the robot. Heavier = more sticky, but also more mass you have to move. So it pretty much equals out.
Third is the distance between the wheels, also called the wheel base. If you make the wheel base longer, without moving the center of gravity, then more weight is on the back. Shorter means less.
The last degree of freedom is where the center of gravity (also called center of mass) is located. Moving the center of gravity closer to the back wheels puts more of the weight on the back wheels, which is what you want.
If your drive wheels are on the front rather than the back, just flip the diagram around so that you are always measuring from your driving wheels.
For our robot we decided to both shorten the wheel base and move the center of gravity much further back. We moved the center of gravity by putting the heaviest part (the EV3 brick) just behind the wheels. This made the center of gravity just in front of the wheels. By making it shorter we made more it agile. The combination should let us go through the road walls and over the crossing barrier much more easily and with greater control.
Today we discovered a problem with our robot. It was not turning very well at all. The wheels would keep slipping. So we tested it and found out that we needed to put more weight on the wheels. We changed our robot so that it was smaller and the center of gravity was just in front of the wheels.
We worked out the math that showed us what was wrong. The center of gravity was towards the front of the robot, which made the driving wheels have very little weight on them. Here is how you can figure this out for your robot.
The first thing to do is measure the distance between the wheels. We call this distance "L". Next, measure the distance from the back wheel to the center of gravity between the wheels. We call this distance "L_b". The ratio of these two numbers tells us a lot of information about how the robot will grip and roll over objects.

Once you have these two numbers you can use them in the fraction portion of the equation below.

As an example, say your "L" is 10 spaces and the center of gravity is roughly 2 spaces in front of the back wheels (L_b). The ratio for how much of the weight of the robot is on the back wheels is (1-2/10), or 0.8, which is 80%. The higher that percentage, the more grip your robot has. The problem with our last robot design was that we were at 30%. This left 70% on the front wheels, which made it very difficult to turn and to roll over things. We changed our robot design so that now it is at roughly 90% of the weight on the back wheels without an attachment, and 80% to 85% with an attachment on the front.
The equation shows us how there are four degrees of freedom for making the robot turn better. First, the "alpha" parameter is the coefficient of friction. (Coefficient means the number stuck on front of another number. It makes it smaller or bigger.) The coefficient of friction means how "sticky" or "slippery" the wheel is on the mat. The higher the coefficient of friction, the better. This number usually goes from 0 to 1 (for example, ice would be a small number, like 0.1. Concrete would be higher, like 0.8.) You can change the coefficient of friction by using tape on the wheels to get the dirt and dust off.
The second degree of freedom is the weight of the robot. Heavier = more sticky, but also more mass you have to move. So it pretty much equals out.
Third is the distance between the wheels, also called the wheel base. If you make the wheel base longer, without moving the center of gravity, then more weight is on the back. Shorter means less.
The last degree of freedom is where the center of gravity (also called center of mass) is located. Moving the center of gravity closer to the back wheels puts more of the weight on the back wheels, which is what you want.
If your drive wheels are on the front rather than the back, just flip the diagram around so that you are always measuring from your driving wheels.
For our robot we decided to both shorten the wheel base and move the center of gravity much further back. We moved the center of gravity by putting the heaviest part (the EV3 brick) just behind the wheels. This made the center of gravity just in front of the wheels. By making it shorter we made more it agile. The combination should let us go through the road walls and over the crossing barrier much more easily and with greater control.
Monday, October 24, 2016
Dogs and Birds
By Jonathan E.
How dogs can help birds. More like hurt.
I learned that dogs can hurt birds. They usually hurt birds even though they are both pets living together. They usually show predatory instincts when they are near a bird. You should take your dog to the vet if they are showing predatory instincts to your bird. I have found out dogs hurt birds, not help them.
The safety of the bird and the prevention of an incident are enormous. Even if your dog is simply showing interest in your bird, rather than wanting to hurt your bird, he can still accidentally hurt your bird in play. Supervision and secure housing for the bird is a must. Your dog should be isolated from your bird. Dogs still show a bit of predatory instinct even if they are a house dog.
Bekker, M. (2013). "Can Dogs and Birds Live Together Safely?" http://www.vetstreet.com/our-pet-experts/can-dogs-and-birds-live-together-safely, April 23, 2013. Retrieved October 23, 2016.
How dogs can help birds. More like hurt.
I learned that dogs can hurt birds. They usually hurt birds even though they are both pets living together. They usually show predatory instincts when they are near a bird. You should take your dog to the vet if they are showing predatory instincts to your bird. I have found out dogs hurt birds, not help them.
The safety of the bird and the prevention of an incident are enormous. Even if your dog is simply showing interest in your bird, rather than wanting to hurt your bird, he can still accidentally hurt your bird in play. Supervision and secure housing for the bird is a must. Your dog should be isolated from your bird. Dogs still show a bit of predatory instinct even if they are a house dog.
Bekker, M. (2013). "Can Dogs and Birds Live Together Safely?" http://www.vetstreet.com/our-pet-experts/can-dogs-and-birds-live-together-safely, April 23, 2013. Retrieved October 23, 2016.
Friday, October 21, 2016
Review of “Pets in the Classroom: The Difference They Can Make” by Ashlea Dancer
By: Mateo Byrd
Burch, M. R. (2003). Wanted!: Animal Volunteers. New York: Howell Book House.
Dancer, Ashlea, “Pets in the Classroom: The Difference They Can Make” (2012). Education Masters. Paper 252.
Eidietis, L., Gray, S., Riggs, L., West, B., and Coffman, M. (2007). Goodbye Critter Jitters. Science and Children, 45(1), 37-41
The Humane Society of the United States, (2009). “Is a Classroom Pet for You?”, Retrieved November 24, 2010 by the Author from http://wwww.humanesociety.org/parents_educators/classroom_pet.html
Meadan, H. & Jegatheesan, B. (2010) Classroom Pets and Young Children: Supporting Early Development. Young Children 65(3), 70-77
Owens, R. & Williams, N., (1995). A New Breed of Teacher’s Pet. Instructor, 90(2), 48-51, 54-55
Stone, B. (2010). Cockapoos in the Classroom: Providing Unique Learning Opportunities for Children With Autism. The Exceptional Parent, 40(5), 24-5.
Introduction
In 2012 Ashlea Dancer wrote a Masters Thesis about the benefits and concerns of pets in the classroom.Benefits
There are many benefits to having pets in the classroom.- The students learn how to work together. The classroom has to communicate and work together to help the pet. (Meadan & Jegatheesan, 2010)
- Having a pet creates a non-judgmental environment in which a student can talk freely. (Meadan & Jegatheesan, 2010)
- Students get an understanding of the needs of others. (Meadan & Jegatheesan, 2010; Brous, 2010).
- Students learn how to appropriately respond to the pet’s needs and behaviors. Students learn self-reliance and self-confidence. (Brous, 2010).
- Students learn to recognize the pets needs and take initiative to respond. Students will gain a sense of perspectives of others as they consider the feelings and situation of the pet. (Stone, 2010)
- Students learn self-monitoring skills. (Brous, 2010) Self-monitoring skills are when students monitor themselves and people around them for correct behavior. Animals can have a calming effect on a child. (Burch, 2003)
- Pets can be used in the curriculum to make learning more fun. (Meadan & Jegatheesan, 2010)
- Pets benefit all students, including those with disabilities. (Brous, 2010; Stone, 2010)
Potential Concerns
The teacher should be the main caretaker. Make sure the pet doesn’t escape. Make sure the students aren't allergic. (Owens & Williams, 1995) “To be a humane role model you must (1) consistently provide all the care the pet needs, (2) establish a classroom code of humane treatment, and (3) remain vigilant in detecting and preventing students’ over-handling, mistreatment, or theft of the animal. (Humane Society, 2009)Selecting an Appropriate Classroom Pet
School district and building policies control what teachers can do. Figure out all safety concerns such as:- Allergies
- In what situation it is prone to biting
- Age consideration
- No for kids under 5: (Meadan & Jegatheesan, 2010) Reptiles, Amphibians, Ducklings, Baby chicks,
- Salmonella considerations
- Hamsters, Reptiles (including turtles)
- No wild or exotic animals (even if found in pet stores) (Humane Society, 2009) For example: chinchillas, frogs, lizards, snakes, turtles Sleeping habits (Humane Society, 2009)
- Don't disturb nocturnal animals, For example: hamsters
- Rabbits are awake in the morning and evening and sleep during the day. (Humane Society, 2009)
- Need to Provide habitat
- Potential background noise during class
Pet Safety
Wear necessary protection and/or sanitary gear. Wash hands with soap and water before and after handling live specimen. (Edietis, Gray, Riggs, & Coffman, 2007, p. 37)Pets in the Curriculum
Having a pet can open opportunities to help students want to read and write. There are many books on animals. You can get them to write stories with the animal included. (Meaden & Jegathesan, 2010)Animal Assisted-Therapy
Several types of pets can be used in animal-assisted therapy. These include: Dogs, Cats, Horses, Farm Animals, and Small or Less Common AnimalsConclusion
There are many benefits to having a pet in the classroom. There are also concerns. You need the correct safety measures.Potential Project Ideas and Research Questions
- Do teachers understand the benefits of pets in the classroom?
- Would having pets in places inside the school but outside the classroom be beneficial?
- Principals office
- Entryway
- Cafeteria/ lunchroom
- Library
- Auditorium
- Hallways
- Office
- Nurse’s office
- Restroom
- Gym
- Science/ STEM lab
- Music room
- SPED room
- Art room
- Gifted room
- What are the School district and building policies about pets in the classroom?
- Why the under-5 age restrictions?
- What habitat and food needs do common class pets have?
- What are some appropriate, common class pets?
References
Brous, M. T. (2010). Integrating Pet Therapy Into Daily School Life. Exceptional Parent, 40(5), 20-21.Burch, M. R. (2003). Wanted!: Animal Volunteers. New York: Howell Book House.
Dancer, Ashlea, “Pets in the Classroom: The Difference They Can Make” (2012). Education Masters. Paper 252.
Eidietis, L., Gray, S., Riggs, L., West, B., and Coffman, M. (2007). Goodbye Critter Jitters. Science and Children, 45(1), 37-41
The Humane Society of the United States, (2009). “Is a Classroom Pet for You?”, Retrieved November 24, 2010 by the Author from http://wwww.humanesociety.org/parents_educators/classroom_pet.html
Meadan, H. & Jegatheesan, B. (2010) Classroom Pets and Young Children: Supporting Early Development. Young Children 65(3), 70-77
Owens, R. & Williams, N., (1995). A New Breed of Teacher’s Pet. Instructor, 90(2), 48-51, 54-55
Stone, B. (2010). Cockapoos in the Classroom: Providing Unique Learning Opportunities for Children With Autism. The Exceptional Parent, 40(5), 24-5.
Thursday, October 20, 2016
Stuffed Pets in the Classroom: An Interview with Julia B.
By Mateo B.
My sister Julia is in 1st grade. In their classroom they have a stuffed animal named "Buster" that is their class pet. I found this interesting because several classrooms have stuffed animal pets. I want to figure out if having a stuffed animal pet will have the same benefits as having a live classroom pet. According to my sister it is enjoyable to get to take care of the classroom pet.

Buster gets to go home with a student for three days. The student is chosen at random (names are on popsicle sticks in a cup.) The student is expected to create a fun activity to do with Buster at home. The student takes pictures and writes up the experience in a journal. The student can also draw pictures in the journal.

My sister Julia is in 1st grade. In their classroom they have a stuffed animal named "Buster" that is their class pet. I found this interesting because several classrooms have stuffed animal pets. I want to figure out if having a stuffed animal pet will have the same benefits as having a live classroom pet. According to my sister it is enjoyable to get to take care of the classroom pet.

Activities Done by the Class with Buster
Buster gets to go home with a student for three days. The student is chosen at random (names are on popsicle sticks in a cup.) The student is expected to create a fun activity to do with Buster at home. The student takes pictures and writes up the experience in a journal. The student can also draw pictures in the journal.

Research Questions
From this interview I have several more questions that would be good to pursue.- Would having a stuffed class pet be similar in benefits to a live pet?
- Is it as enjoyable to have a stuffed classroom pet?
- Would students from the different grades respond similarly to a stuffed classroom pet?
Reference
Byrd, M. (2016) "Stuffed Pets in the Classroom: An Interview with Julia B." Personal Notes. October 20th, 2016.Wednesday, October 19, 2016
Appreciation Game
By Aaron Byrd
I noticed that the students had a difficult time in the respect game. I realized that in large part this was because they were not attuned to recognizing situations to show respect. I adapted a couple of games/ice breaker activities to create a new game to help them get started with recognizing situation to show respect.
During this phase you'll notice that the team goes through all of the team building stages. Sometimes people want to be outside of the rug/playing area, where they can be outside of the group (forming). Sometime people try to do different activities with the ball, like throw it up in the air to themselves or for anyone to get (storming.) Sometimes they'll throw or bat the ball to each other instead of toss the ball (norming.) Once the team has successfully started all gently tossing the ball to each other they'll start to get more and more catches and they will enjoy the activity and cheer each other on (performing.)
At the beginning of this round it will be a struggle for the students to come up with things they appreciate. This is because they do not yet have the skills to recognize situations where others positively influence them. Playing this game periodically will help the team learn and recognize what others do for them and provide the personal motivation to be more respectful.

I noticed that the students had a difficult time in the respect game. I realized that in large part this was because they were not attuned to recognizing situations to show respect. I adapted a couple of games/ice breaker activities to create a new game to help them get started with recognizing situation to show respect.
Phase 1
Phase one of the game is to get the kids together on a mat and get them working together. They sit in a circle and gently toss a small ball around to each other. The goal is to simply get them working together on a simple task. The goal for this part of the phase is to have them count how many times they can toss the ball around without dropping it. They will naturally try to improve their team score by working together better as a team. Let this proceed for 5-15 minutes.During this phase you'll notice that the team goes through all of the team building stages. Sometimes people want to be outside of the rug/playing area, where they can be outside of the group (forming). Sometime people try to do different activities with the ball, like throw it up in the air to themselves or for anyone to get (storming.) Sometimes they'll throw or bat the ball to each other instead of toss the ball (norming.) Once the team has successfully started all gently tossing the ball to each other they'll start to get more and more catches and they will enjoy the activity and cheer each other on (performing.)
Phase 2
Now that the team has experienced the whole team building process in one short activity and has come together to successfully trust each other and perform as a team you can move on to phase 2. Phase 2 involves a different game but is played in a similar manner to the first. In this phase, when someone catches the ball they need to state something they appreciate about the person that just tossed the ball. They will find this very challenging. There are two rules. First, the statements must begin with "I appreciate..." Second, the statements must be about something the person has done, not about the way they look or things they have. As a coach your goal is to get them to relate actions in another person to feelings in response to those actions. The students will need help understanding the difference between "I appreciate" and "I like". It will help the team if you as a coach helps the students rephrase their words to fit the mold.At the beginning of this round it will be a struggle for the students to come up with things they appreciate. This is because they do not yet have the skills to recognize situations where others positively influence them. Playing this game periodically will help the team learn and recognize what others do for them and provide the personal motivation to be more respectful.

Research Areas
There are several areas of research students can look at. It is helpful to explain these areas and help them understand the differences.
Newspapers
Magazines
Blogs
Online News Outlets
Animal Shelter Employees
Wildlife Management Professionals
Teachers at school
Government Biologists
Animal Therapists
Government data websites
Government-produced technical materials. For example, the ERDC Library will have a wide range of subject areas.
Academic Thesis and Dissertations. These are usually found via school library websites or googling.
Academic Journals. Researchers will publish articles on their work in journals.
Books from a library, either school or city library
Textbooks that cover some particular topic
Periodicals
Periodicals are anything that is periodically created. Examples include:Professionals and Personal Interviews
These interviews can be professional sources who spend time researching or solving similar problems, or simply people who are involved with the issue somehow. Here are some examples for the Animal Adventures theme this year:Academic and Government Sources
There are a wide range of Academic and Government sources, but these are often written at a very high technical level.Books and Textbooks
This category includes sources that cover topical areas that are produced once. Examples:Monday, October 17, 2016
Inclusion
By: Stella E
One of our core values is to include everyone in all of our goals and acomplishments . For example, we make sure everyone has a role in the team.Some of these roles include, time keeper, team captain, programmer, runner, core values leader, project manager, etc. That was just an example there are many more ways to use inclusion.
One of our core values is to include everyone in all of our goals and acomplishments . For example, we make sure everyone has a role in the team.Some of these roles include, time keeper, team captain, programmer, runner, core values leader, project manager, etc. That was just an example there are many more ways to use inclusion.
Review of "My First Guide To Robots" by Katherine Clay
By Donovan B.
Factories began using robots in the 1960s. Unimate was a big robotic arm. The robot stacked metal plates in a car factory.
FUN FACT:A robot named Smart Restaurant chops onions and tomatoes. Then it helps build up to 360 burgers per hour.
Introduction
This book is about robots. It talks about some of the history of robots and what they can do.History of Robots
the word "Robot" was not created until 1920. In 1920 Karel Capek wrote about machines that acted like humans. He called them robota,which means “worker” in the Czech language.Factories began using robots in the 1960s. Unimate was a big robotic arm. The robot stacked metal plates in a car factory.
Examples of Robots
Today factory robots can do many more advanced jobs.Some robots use tiny”fingers” to tighten bolts and fix computer parts. Robots are not limited to factory work. Robots on farms can feed and milk cows. AgAnts are small robots that work in fields. Groups of AgAnts swarm together to pull out weeds.FUN FACT:A robot named Smart Restaurant chops onions and tomatoes. Then it helps build up to 360 burgers per hour.
Conclusion
Robots are used for many jobs that they can do better than humans. For example, things that need to be done over and over again.References
Clay, K. (2015) "My Guide to Robots". Capstone Press, North Mankato, MinnesotaTuesday, October 11, 2016
Example Citations and References
Capturing references and appropriately citing them is very helpful in documenting that you actually studied a range of sources. Below is an example of this.
----------------
At school today I asked around to find a teacher who has a pet in his/her classroom. Mrs. Walsh has a pet fish. I asked her about the benefits and challenges of having a pet in the classroom. (Byrd, 2016)
----------------
I recently read a really cool book on robots. The author,
Katherine Clay, did a great job a showing several jobs where robots can do
dangerous jobs for people (Clay, 2014).
I watched a cool video about robotic dogs washing dishes (CNN, 2016.) I bet my mom would love a robotic dog that could wash the dishes! I think
elderly people and disabled people would really benefit from a robotic dog for
washing the dishes.
References
Clay, K., 2014. Robots in Risky Jobs on the Battlefield
and Beyond. Capstone Press, North
Mankato , MN
Byrd, M. 2016. “Notes from Personal Interview of Mrs. Walsh,
a Teacher at Bowmar Elementary.”
CNN. 2016. “Watch this robotic dog do the dishes.” http://www.cnn.com/videos/cnnmoney/2016/06/23/robotic-dog-boston-dynamics-cnnmoney.cnn.
Viewed on 11 October 2016.
Monday, October 10, 2016
System for Developing Respect
By Aaron Byrd
Respect for fellow team members is a common challenge that teams face. In FLL, respect for each other is a central part of Gracious Professionalism and Coopertition. It is also a metric directly measured as part of a competition. This is another area where having a process or system to develop respect will be a key part of your success as a team as well as a key part to your team having fun.
I don't have all the answers or even a "best method" approach to developing respect. The team, though, has come up with a system that we are starting to use. We call it "The Respect Game." We employed a few ideas and concepts in the development of this method:Focus on the positive, not the negative.
Respect is an interpersonal skill, meaning it involves more than one person. It can't be learned or practiced alone.
Use "Gamefication" to make a team game that involves a score and rules.
Just as a scoreboard in an athletic event helps everyone see where they stand and where you are headed, use a scoreboard for the game.
Use our recognition system to provide milestones and recognize group achievement.
For our respect game, here is how team members earn points:
Showing Simple Respect: 1 pointActively Listen – “So what I understand you are saying is…”
Encouragement – “You can do this.” “ You’ve got it.”
Congratulate – “That was awesome.” “Great Job.” “Well done.”
Be Helpful – “How could I help you?”
Say Thank You – “I appreciate that you took your time to help me.”
Giving Social Money: 2 pointsSignificance – “You’re Awesome!”
Likeable – “I really like what you did.” “I like how you phrased that.”
Competent – “You did a great job.” “What you made works really well.”
We will go over the game at the beginning of each meeting and the coaches will be the "refs." The team came up with a goal of 50 points as our first milestone. As we just started, I'll let you know how it goes!
Respect for fellow team members is a common challenge that teams face. In FLL, respect for each other is a central part of Gracious Professionalism and Coopertition. It is also a metric directly measured as part of a competition. This is another area where having a process or system to develop respect will be a key part of your success as a team as well as a key part to your team having fun.
I don't have all the answers or even a "best method" approach to developing respect. The team, though, has come up with a system that we are starting to use. We call it "The Respect Game." We employed a few ideas and concepts in the development of this method:
For our respect game, here is how team members earn points:
Showing Simple Respect: 1 point
Giving Social Money: 2 points
We will go over the game at the beginning of each meeting and the coaches will be the "refs." The team came up with a goal of 50 points as our first milestone. As we just started, I'll let you know how it goes!
System for Managing Team Development
By Aaron Byrd
One of the key systems any team needs is to help the team members develop and understanding of the FLL Core Values, as well as individual team core values if you pick some. There are two areas that teams and coaches often need help in. The first is having an understanding of the team development process and the second is team members showing respect for each other.
The first dynamic a coach and/or team captain needs to understand is the stages of team development. A good framework for this was created by Bruce Tuckman in 1965. Tuckman's model has the team going through four primary stages:
Forming
Storming
Norming
Performing
Understanding and being able to recognize these stages is extremely helpful if you also have a framework for what to do in these stages. The Boy Scouts of America have a great framework called the "Leading EDGE" that helps us as leaders know what to do. (Here is a good presentation on it.)
Briefly, the forming stage occurs whenever team members are added or subtracted. It conceptually covers an in or out process. Unless you are losing people, it is a high-energy time when folks are excited. The leadership style best suited to this time is one where a lot of Explaining happens (the first E in EDGE). Spend time explaining how the team will work, what the team goals are, what communication process you'll use, etc.
The storming stage is harder to manage as it is characterized by uncertainty in roles and details about what need to happen. Team members enthusiasm starts to drop. The leadership style best suited to this situation is a "Demonstrating" style (D in EDGE). Leaders are actively assigning roles, and helping folks see and understand how to behave and relate to one another by setting the example. The team enthusiasm is usually lowest as the storming process drags on. An effective leader will be watchful for low motivation and/or team members seeking an exit from the team and work to lift and keep spirits high.
The norming stage is where team starts to come together and begins to put the individual parts together into a functioning whole. The norming stage is where folks have accepted the team roles and begin the function in their roles. They are not proficient at first but with practice and "Guiding" (D in EDGE) from the team leader they will become more capable and more able to effectively function as a whole. The leader needs to focus on helping the team members become effective by focusing on the details of the processes they are in charge of. As they see the team performing and accomplishing tasks together their enthusiasm will rise.
The fourth stage is performing. This is the stage that is most enjoyable. The team is clicking and able to function well together. Spirits are high and folks are performing at their best. At this stage the leaders simply "Enable" (last E in EDGE) the team to keep performing - make sure resources are in place and upcoming needs are taken care of.
The system for managing a team is really to observe the team for these dynamics - how well are they functioning together, how is their enthusiasm level, and then understand how to modify your leadership style for the situation. By understanding the stages of team development and the appropriate leadership style you'll be able to manage the process of getting the team to the performing stage where they are living the core have "have fun!"
One of the key systems any team needs is to help the team members develop and understanding of the FLL Core Values, as well as individual team core values if you pick some. There are two areas that teams and coaches often need help in. The first is having an understanding of the team development process and the second is team members showing respect for each other.
The first dynamic a coach and/or team captain needs to understand is the stages of team development. A good framework for this was created by Bruce Tuckman in 1965. Tuckman's model has the team going through four primary stages:
Understanding and being able to recognize these stages is extremely helpful if you also have a framework for what to do in these stages. The Boy Scouts of America have a great framework called the "Leading EDGE" that helps us as leaders know what to do. (Here is a good presentation on it.)
Briefly, the forming stage occurs whenever team members are added or subtracted. It conceptually covers an in or out process. Unless you are losing people, it is a high-energy time when folks are excited. The leadership style best suited to this time is one where a lot of Explaining happens (the first E in EDGE). Spend time explaining how the team will work, what the team goals are, what communication process you'll use, etc.
The storming stage is harder to manage as it is characterized by uncertainty in roles and details about what need to happen. Team members enthusiasm starts to drop. The leadership style best suited to this situation is a "Demonstrating" style (D in EDGE). Leaders are actively assigning roles, and helping folks see and understand how to behave and relate to one another by setting the example. The team enthusiasm is usually lowest as the storming process drags on. An effective leader will be watchful for low motivation and/or team members seeking an exit from the team and work to lift and keep spirits high.
The norming stage is where team starts to come together and begins to put the individual parts together into a functioning whole. The norming stage is where folks have accepted the team roles and begin the function in their roles. They are not proficient at first but with practice and "Guiding" (D in EDGE) from the team leader they will become more capable and more able to effectively function as a whole. The leader needs to focus on helping the team members become effective by focusing on the details of the processes they are in charge of. As they see the team performing and accomplishing tasks together their enthusiasm will rise.
The fourth stage is performing. This is the stage that is most enjoyable. The team is clicking and able to function well together. Spirits are high and folks are performing at their best. At this stage the leaders simply "Enable" (last E in EDGE) the team to keep performing - make sure resources are in place and upcoming needs are taken care of.
The system for managing a team is really to observe the team for these dynamics - how well are they functioning together, how is their enthusiasm level, and then understand how to modify your leadership style for the situation. By understanding the stages of team development and the appropriate leadership style you'll be able to manage the process of getting the team to the performing stage where they are living the core have "have fun!"
Goals are for Losers
By Aaron Byrd
Recently I read the book "How to Fail at Everything and Still Win Big: Kind of the Story of My Life." by Scott Adams. One of this personal mottos is "Goals are for Losers. Systems are for Winners." While I don't agree with this 100%, there are several good application of this to an FLL robotics team.
First, why are goals for losers? Inherent in setting of a goal is realizing that you have not succeeded. This emotionally puts you at a disadvantage. Clearly, you need a direction to aim for, but the process of traveling the path in the direction you want to go is the key, not where you finally end up. Applications of this are many - do you memorize math facts or learn how to use math to solve real-world problems? Do you get a team presentation done by yourself at the expense of learning how a team needs to come together to make a presentation?
For example, you can set a goal as "Score 200 points on the robot game by December 1st." This is certainly a SMART goal: Specific, Measurable, Achievable, Relevant, and Time-bound. However, it doesn't actually get you to the goal - coming up with how to get there is a separate process. However, the point of FLL is to inspire students and to help them begin to develop the skills that will help them succeed in STEM fields. From that viewpoint, is having one brilliant programmer work on the robot the right choice, or have a process where everyone can build, program, debug, and learn how to build a system that works in the real world, taking an idea from concept to application? Clearly, the system that helps the team members grow personally is actually the real goal.
What about the project? The real "goal" is to help the team members learn about the process of researching a field, narrowing down to a specific problem, creating a solution, taking that solution to a real-world application, if possible, and sharing your results. What is the system for that? Do you spend a few minutes each meeting talking about how they are doing at the research process? Where do they get stuck and struggle? How can they learn from each other and use each other's strengths to help them move forward? It is important to create a system that gets you where you want to go, not simply pick a goal and say "run!"
Recently I read the book "How to Fail at Everything and Still Win Big: Kind of the Story of My Life." by Scott Adams. One of this personal mottos is "Goals are for Losers. Systems are for Winners." While I don't agree with this 100%, there are several good application of this to an FLL robotics team.
First, why are goals for losers? Inherent in setting of a goal is realizing that you have not succeeded. This emotionally puts you at a disadvantage. Clearly, you need a direction to aim for, but the process of traveling the path in the direction you want to go is the key, not where you finally end up. Applications of this are many - do you memorize math facts or learn how to use math to solve real-world problems? Do you get a team presentation done by yourself at the expense of learning how a team needs to come together to make a presentation?
For example, you can set a goal as "Score 200 points on the robot game by December 1st." This is certainly a SMART goal: Specific, Measurable, Achievable, Relevant, and Time-bound. However, it doesn't actually get you to the goal - coming up with how to get there is a separate process. However, the point of FLL is to inspire students and to help them begin to develop the skills that will help them succeed in STEM fields. From that viewpoint, is having one brilliant programmer work on the robot the right choice, or have a process where everyone can build, program, debug, and learn how to build a system that works in the real world, taking an idea from concept to application? Clearly, the system that helps the team members grow personally is actually the real goal.
What about the project? The real "goal" is to help the team members learn about the process of researching a field, narrowing down to a specific problem, creating a solution, taking that solution to a real-world application, if possible, and sharing your results. What is the system for that? Do you spend a few minutes each meeting talking about how they are doing at the research process? Where do they get stuck and struggle? How can they learn from each other and use each other's strengths to help them move forward? It is important to create a system that gets you where you want to go, not simply pick a goal and say "run!"
Wednesday, October 5, 2016
Pets in the Classroom, An Interview with Mrs. Walsh
By Mateo B.
This summer I did some research on pets in the classroom. I learned that having a pet in the class room is a good way to teach responsibility. Studies show that having a pet in the classroom might have a positive effect on grades. I interviewed one of the teachers at my school, Mrs. Walsh, who has a pet fish in her classroom. I talked to her and she said it is hard to keep the tank clean, and the fish has to go home on breaks and it is hard to chose someone to take the fish home. The children in the classroom take turns feeding the fish, and most of the kids enjoy it so that usually happens.
Students learn to take care of a pet
Students enjoy being in the classroom more
ChallengesMost students (but not all) do not want to do the unpleasant chores
Taking care of pets over weekends and extended breaks requires more logistics (finding people, ensuring feed/bedding/etc. supplies are delivered, etc.)
Pets in the Classroom (2016). "Benefits of Classroom Animals." http://www.petsintheclassroom.org/teachers/benefits-of-classroom-animals/. Viewed October 18th, 2016.
This summer I did some research on pets in the classroom. I learned that having a pet in the class room is a good way to teach responsibility. Studies show that having a pet in the classroom might have a positive effect on grades. I interviewed one of the teachers at my school, Mrs. Walsh, who has a pet fish in her classroom. I talked to her and she said it is hard to keep the tank clean, and the fish has to go home on breaks and it is hard to chose someone to take the fish home. The children in the classroom take turns feeding the fish, and most of the kids enjoy it so that usually happens.
Summary
BenefitsChallenges
References
Byrd, M. (2016) Personal Notes from Interview with Mrs. Walsh, September 27th, 2016.Pets in the Classroom (2016). "Benefits of Classroom Animals." http://www.petsintheclassroom.org/teachers/benefits-of-classroom-animals/. Viewed October 18th, 2016.
Monday, October 3, 2016
Goals and Processes (or Systems)
By Aaron Byrd
One of the metrics used to judge the team is how well they A) have clear, achievable goals AND B) have a process to achieve those goals. This is part of the Core Values judging competition.
Both of these can be somewhat problematic if not focused on at the beginning of the team season. Most teams fall into one of two "goal" categories: win at the competition, or, learn and have fun. Both of these are good but they are not specific enough.
Defining goals is a challenge, both linguistically and mentally. Goals often fall into one of two general categories: goals about how you are and goals about what you do. Both of these kinds of goals should fit into the SMART framework: Specific, Measurable, Achievable, Relevant, and Time-based.
It often helps to write goals down to get your ideas going, even if they are rough and need refining. Then, you can compare against the SMART framework and revise your goal until it is satisfactory.
Having goals, though, is still not enough. You need a process for achieving the goals. Hopefully you factored this into the goal when you were satisfied that it was Achievable.
Another name for a process is a system. You need an ongoing set of tasks or skills to be practiced that, when taken over time, will lead you to your goal. However, this set of tasks still falls short of being a system that the team uses to accomplish its goal. For the team to accomplish its goals using a process or system, it needs a team leadership structure. For example, the Boy Scouts of America strongly encourage the use of the Patrol Method as a team leadership structure that allows the overall group to better accomplish its goals through a process that puts into place the tasks that need to be done. This is the pattern: Team GOALS -> Team PROCESS -> Team TASKS
In our team we are using a team captain and committees as the process or system by which we develop and oversee the accomplishment of the tasks. So far we have a recognition committee, a core values committee, and a project committee, each with a committee chair. We will in the future form a robotics committee, but we haven't decided whether to keep programming and mechanical design as sub-committees or parallel committees.
A key part of a committee is the purpose of the committee, which I'll cover in a future blog.
One of the metrics used to judge the team is how well they A) have clear, achievable goals AND B) have a process to achieve those goals. This is part of the Core Values judging competition.
Both of these can be somewhat problematic if not focused on at the beginning of the team season. Most teams fall into one of two "goal" categories: win at the competition, or, learn and have fun. Both of these are good but they are not specific enough.
Defining goals is a challenge, both linguistically and mentally. Goals often fall into one of two general categories: goals about how you are and goals about what you do. Both of these kinds of goals should fit into the SMART framework: Specific, Measurable, Achievable, Relevant, and Time-based.
It often helps to write goals down to get your ideas going, even if they are rough and need refining. Then, you can compare against the SMART framework and revise your goal until it is satisfactory.
Having goals, though, is still not enough. You need a process for achieving the goals. Hopefully you factored this into the goal when you were satisfied that it was Achievable.
Another name for a process is a system. You need an ongoing set of tasks or skills to be practiced that, when taken over time, will lead you to your goal. However, this set of tasks still falls short of being a system that the team uses to accomplish its goal. For the team to accomplish its goals using a process or system, it needs a team leadership structure. For example, the Boy Scouts of America strongly encourage the use of the Patrol Method as a team leadership structure that allows the overall group to better accomplish its goals through a process that puts into place the tasks that need to be done. This is the pattern: Team GOALS -> Team PROCESS -> Team TASKS
In our team we are using a team captain and committees as the process or system by which we develop and oversee the accomplishment of the tasks. So far we have a recognition committee, a core values committee, and a project committee, each with a committee chair. We will in the future form a robotics committee, but we haven't decided whether to keep programming and mechanical design as sub-committees or parallel committees.
A key part of a committee is the purpose of the committee, which I'll cover in a future blog.
Putting Active Listening to Work at Church
By Donovan B.
Active listening requires a messenger, a message, and a receiver. To be a good active listener, you must be respectful to other people's ideas.
I use active listening at church during bible study. We listen to each other and read bible verses. We don't try to take over while someone is talking or demonstrating.
Active listening requires a messenger, a message, and a receiver. To be a good active listener, you must be respectful to other people's ideas.
I use active listening at church during bible study. We listen to each other and read bible verses. We don't try to take over while someone is talking or demonstrating.
Team Goals - Draft #1
Improve technical communication skills, written and verbal.
Practice being respectful, working as a team, ensuring all team members are included, and living the 7 habits.
Share our knowledge with other teams.
Boost morale, encourage personal and team growth, motivate team members, and help the team have fun
Do awesome at the competitions
Practice being respectful, working as a team, ensuring all team members are included, and living the 7 habits.
Share our knowledge with other teams.
Boost morale, encourage personal and team growth, motivate team members, and help the team have fun
Do awesome at the competitions
A Problem With Birds
By Tatum W.
Today in robotics we had a guest speaker, Mrs. Dena Dickerson. She shared a problem about birds with us. There were some birds on lock and dam that were pooping all over it and ruining the concrete and machinery. We did not know the solution, so we shared the ideas we had to fix the problem. She said they were all great ideas and she was glad we could think of it right off of the top of our minds. The solution Mrs. Dickerson came up with, that worked well, was to use a border collie to scare off the birds. The dog is now an official federal employee and does a great job!
Today in robotics we had a guest speaker, Mrs. Dena Dickerson. She shared a problem about birds with us. There were some birds on lock and dam that were pooping all over it and ruining the concrete and machinery. We did not know the solution, so we shared the ideas we had to fix the problem. She said they were all great ideas and she was glad we could think of it right off of the top of our minds. The solution Mrs. Dickerson came up with, that worked well, was to use a border collie to scare off the birds. The dog is now an official federal employee and does a great job!
Friday, September 30, 2016
Color Sensor Array
By Mateo B.
Last year we used a triple color sensor array. We used this to track lines as well as be able to stop at lines that branched off of the main line.
Color sensors are sensitive to ambient light, which is light that comes from the surroundings. To prevent that from affecting our sensors we put a bar in front of them to block as much ambient light as possible.
Color sensors are also sensitive to the distance from the mat to the sensor. We did some tests to find the best distance from the mat to the sensor. We measured the total reflected light as the sensor was moved up and down at different heights. We found the optimal distance to be 2/3 of a bar.
We found that the sensors could also be affected by reflected from the other sensors. We spaced them out to help alleviate cross-contamination.
The spacing was also due to the line following algorithm. Two sensors were used as the primary line following algorithm, one on each side of the line the robot is following. In a line following algorithm you don't follow the line, you follow the edge of the line where the reflected light is 50 (half white and half black.) We spaced them to perfectly fit both sides of the line.

Last year we used a triple color sensor array. We used this to track lines as well as be able to stop at lines that branched off of the main line.
Color sensors are sensitive to ambient light, which is light that comes from the surroundings. To prevent that from affecting our sensors we put a bar in front of them to block as much ambient light as possible.
Color sensors are also sensitive to the distance from the mat to the sensor. We did some tests to find the best distance from the mat to the sensor. We measured the total reflected light as the sensor was moved up and down at different heights. We found the optimal distance to be 2/3 of a bar.
We found that the sensors could also be affected by reflected from the other sensors. We spaced them out to help alleviate cross-contamination.
The spacing was also due to the line following algorithm. Two sensors were used as the primary line following algorithm, one on each side of the line the robot is following. In a line following algorithm you don't follow the line, you follow the edge of the line where the reflected light is 50 (half white and half black.) We spaced them to perfectly fit both sides of the line.


Corner Jig
By Mateo B.
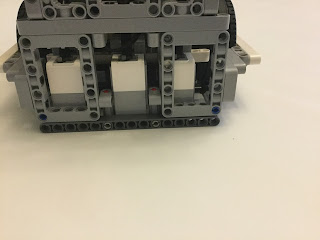
It is important to always line up your robot correctly. Last year we made a corner jig. The corner jig helps us line up the robot the same way when we need to line up at a 45 degree angle. The challenge to building a corner jig is to get the angles right while making it the right number of spaces along the long side so that it actually connects correctly. The pictures below show our jig from two different angles. The black portions sticking out were placed along the sides of the robot so that we could always start at the same spot.


It is important to always line up your robot correctly. Last year we made a corner jig. The corner jig helps us line up the robot the same way when we need to line up at a 45 degree angle. The challenge to building a corner jig is to get the angles right while making it the right number of spaces along the long side so that it actually connects correctly. The pictures below show our jig from two different angles. The black portions sticking out were placed along the sides of the robot so that we could always start at the same spot.


Monday, September 26, 2016
Have a Plan
By Mateo B.
It is helpful to have a plan. For meetings, you can make an agenda. Agendas help you stay organized. They also help you remember what to do. One time in a meeting I forgot what we were supposed to do next. I looked at the agenda and I saw it, so I remembered. This goes along with habit #2, Begin With the End in Mind.
It is helpful to have a plan. For meetings, you can make an agenda. Agendas help you stay organized. They also help you remember what to do. One time in a meeting I forgot what we were supposed to do next. I looked at the agenda and I saw it, so I remembered. This goes along with habit #2, Begin With the End in Mind.
Actively Listen for Effective Communication
By Eli S.
Communicating clearly and asking questions is good so people understand you. In the game called phone one person starts and you pass it on by whispering and the last person says it out loud so the first person says if it is right and if not they tell you. In the game we played we weren’t communicating well so it got misunderstood and told wrong. To communicate well you need to ask questions. You also need to focus as a listener on what is being said. That's called active listening.
Communicating clearly and asking questions is good so people understand you. In the game called phone one person starts and you pass it on by whispering and the last person says it out loud so the first person says if it is right and if not they tell you. In the game we played we weren’t communicating well so it got misunderstood and told wrong. To communicate well you need to ask questions. You also need to focus as a listener on what is being said. That's called active listening.
Synergy and Beginning With the End in Mind
By Jonathan E.
Beginning With the End In Mind and Synergy are two crucial core values. Beginning With The End In Mind means to have a plan. Without a plan you will get nowhere or it will be disorganized. It makes up the foundation of a project and guides you to finishing it.
In Robotics we Begin With The End In Mind all the time. It doesn’t matter if it’s a project like building a robot and programming it or spending time brainwriting. Plans help you be organized.
The second crucial core value is Synergy. Synergy is when you work together as a team to accomplish a goal. It makes us a team and brings us closer together. What good is having a plan without working together? None of these two crucial core values can work without each other.
Beginning With the End In Mind and Synergy are two crucial core values. Beginning With The End In Mind means to have a plan. Without a plan you will get nowhere or it will be disorganized. It makes up the foundation of a project and guides you to finishing it.
In Robotics we Begin With The End In Mind all the time. It doesn’t matter if it’s a project like building a robot and programming it or spending time brainwriting. Plans help you be organized.
The second crucial core value is Synergy. Synergy is when you work together as a team to accomplish a goal. It makes us a team and brings us closer together. What good is having a plan without working together? None of these two crucial core values can work without each other.
Committees as a Tool for Team Growth
By Stella E.
This week in robotics we established team led committees. It is important to have team leadership, so that the team can be independent while sharing, or being judged. Also it helps develop team growth. For example, if the team has the project done for them they will not grow from reaching goals and learning from mistakes. That's why its important to have team leadership.
We have Core Values, Project, and Recognition committees. Each committee has a specific purpose that is part of what the team needs to accomplish.
This week in robotics we established team led committees. It is important to have team leadership, so that the team can be independent while sharing, or being judged. Also it helps develop team growth. For example, if the team has the project done for them they will not grow from reaching goals and learning from mistakes. That's why its important to have team leadership.
We have Core Values, Project, and Recognition committees. Each committee has a specific purpose that is part of what the team needs to accomplish.
Monday, September 19, 2016
Importance of Active Listening
Adalyn A.
This week I learned how to use active listening and how to work with my peers. Active Listening is a way of listening and responding to another person that improves understanding. For example, If my friend is talking to me I would use active listening by stopping what I am doing and not daydream or play with my hair. I would give her my full attention.
This week I learned how to use active listening and how to work with my peers. Active Listening is a way of listening and responding to another person that improves understanding. For example, If my friend is talking to me I would use active listening by stopping what I am doing and not daydream or play with my hair. I would give her my full attention.
Friday, August 19, 2016
Color Menu
By Mateo B.
This is an example program that demonstrates how to use a color sensor to select a set of commands.

There are several parts to this program. The first is a main loop. In this example it goes on infinitely.

The second part is the first switch block. It tells the color sensor in port 3 to look for the color red.
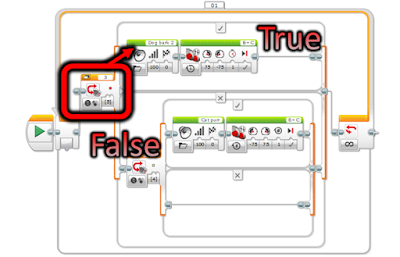
The true part means the color sensor in port 3 found the color red, so it should do the first code branch. In the example, this is to make a barking sound and pivot to the right.
The false part means the color sensors did not find red, so go on to the next check of the color sensor.
Pseudo-code:
do
{
if sensor3 equals red then:
{
<Do code branch #1>
}
else
{
if sensor3 equals yellow then:
{
<Do code branch #2>
}
}
} while (true)
This is an example program that demonstrates how to use a color sensor to select a set of commands.

There are several parts to this program. The first is a main loop. In this example it goes on infinitely.

The second part is the first switch block. It tells the color sensor in port 3 to look for the color red.

The true part means the color sensor in port 3 found the color red, so it should do the first code branch. In the example, this is to make a barking sound and pivot to the right.
The false part means the color sensors did not find red, so go on to the next check of the color sensor.

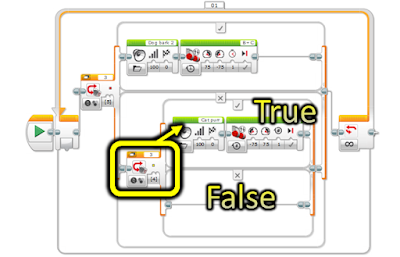
At the second check of the color sensor, it looks for the color yellow. If it finds the color yellow, then it starts the second code branch. If it does not find the color yellow, then it exits both of the switch statements with doing nothing. Because it is still in the main loop, it will keep repeating the process to search for the chosen colors.
If you wanted to add more choices, add more switch blocks and follow the pattern.
do
{
if sensor3 equals red then:
{
<Do code branch #1>
}
else
{
if sensor3 equals yellow then:
{
<Do code branch #2>
}
}
} while (true)
Sunday, June 19, 2016
Think Win-Win
By Mateo B.
"Think Win-Win" is one of our team's core values. It means that we can create solutions where everyone wins, rather than one person or team winning and one loosing. Thinking win-win takes a different perspective and mind set. For example, in sports it often seems like one team wins and one looses. Thinking win-win would mean to realize that the real goal is to have fun and do your best. If you do your best and have good sportsmanship by congratulating the other team members when they do their best, you all have fun and you both win.
In our FLL team used think win-win in our project. We created recycling solutions that helped our school compete in the national recycle bowl and helped local businesses recycle their materials. We also partnered with the other FLL team in our recycling efforts.
"Think Win-Win" is one of our team's core values. It means that we can create solutions where everyone wins, rather than one person or team winning and one loosing. Thinking win-win takes a different perspective and mind set. For example, in sports it often seems like one team wins and one looses. Thinking win-win would mean to realize that the real goal is to have fun and do your best. If you do your best and have good sportsmanship by congratulating the other team members when they do their best, you all have fun and you both win.
In our FLL team used think win-win in our project. We created recycling solutions that helped our school compete in the national recycle bowl and helped local businesses recycle their materials. We also partnered with the other FLL team in our recycling efforts.
Time Management
"Wise time management is really the wise management of ourselves."
-Spencer W. Kimball
Effective teams have a process for managing their time. There are many tasks to do, many things to learn, and at the end of it all the team members are still just kids. Having a process for managing time during the meetings is a wise practice. Ideally, the team leaders (kids) will decide what are the key points to cover in a planning meeting. This will change throughout the season.
The process of time management has a few key points:
1) there is a youth leader or leadership team that (helps) set the direction for the team.
2) the leadership team regularly meets to plan what needs to happen
3) meeting agendas are developed and used
4) a team member is assigned to manage the time and activities during the meeting (which doesn't need to be one of the leaders or even the same person for each meeting.)
-Spencer W. Kimball
Effective teams have a process for managing their time. There are many tasks to do, many things to learn, and at the end of it all the team members are still just kids. Having a process for managing time during the meetings is a wise practice. Ideally, the team leaders (kids) will decide what are the key points to cover in a planning meeting. This will change throughout the season.
The process of time management has a few key points:
1) there is a youth leader or leadership team that (helps) set the direction for the team.
2) the leadership team regularly meets to plan what needs to happen
3) meeting agendas are developed and used
4) a team member is assigned to manage the time and activities during the meeting (which doesn't need to be one of the leaders or even the same person for each meeting.)
Saturday, June 4, 2016
The Role of Vocal Tone in Communication
By Aaron Byrd
Vocal tone, or how we sound when we are talking, has a significant influence on how our message is received. This great TED talk by Laura Sicola discusses the role of vocal tone in our communication. This is one of the more difficult aspects of effective speaking to teach but also one of the more beneficial. Laura highlights a study that shows that 38% of effective communication depends on vocal tone. 55% of how the message is received depends on non-verbal. Only 7% is the actual words.
A great thought that Laura points out that applies to our FLL presentations is the balance between the time spent preparing the words and materials for the presentations and the time we spend on how we sound we we say them. Do we really spend 5x the time working on effective delivery as we do on developing the materials? Effective, professional-sounding teams do!
Vocal tone, or how we sound when we are talking, has a significant influence on how our message is received. This great TED talk by Laura Sicola discusses the role of vocal tone in our communication. This is one of the more difficult aspects of effective speaking to teach but also one of the more beneficial. Laura highlights a study that shows that 38% of effective communication depends on vocal tone. 55% of how the message is received depends on non-verbal. Only 7% is the actual words.
A great thought that Laura points out that applies to our FLL presentations is the balance between the time spent preparing the words and materials for the presentations and the time we spend on how we sound we we say them. Do we really spend 5x the time working on effective delivery as we do on developing the materials? Effective, professional-sounding teams do!
Friday, June 3, 2016
Procrastination
By Aaron Byrd
Having a plan for the season is the first component to having a successful year. The second component is actually accomplishing your plan.
Inside the Mind of a Master Procrastinator is a great TED talk that discusses why people procrastinate. Most people tend to procrastinate. This talk helps to explain why.
Having a plan for the season is the first component to having a successful year. The second component is actually accomplishing your plan.
This website at unstuck.com discusses four common reasons we procrastinate and how we can move past procrastination. Common reasons for procrastination include:
- Waiting for just the right time or just the right setting to do the task.
- You are used to working under pressure but not so much when you are not under pressure.
- Productive procrastination, where you work on what needs to be done but not on what is most important.
- Second guessing decisions and waffling back and forth.
In an FLL team procrastination can come in to play individually, as sub-groups or committees, and as the whole team. As a coach it will help if you figure out what motivates the team, the sub-groups, and the individuals. Is it having fun and being social? Is it rewards and recognition? Is it the opportunity to accomplish new challenges? You can build motivational milestones into the season for the team. Fun and social? Plan team outings or parties that happen when the team finishes a task. Rewards and recognition? Have visual rewards, perhaps a chart of accomplishments or buttons for accomplishing different tasks. Again, the secret is to find out what motivates your team mebers and use that to help motivate the team.
Thursday, June 2, 2016
Project Management Skills, Part 1
By Aaron Byrd
Project management is an important concept to learn. In order to successfully manage their time, the team needs to know how to manage the project. The team needs goals and milestone, and a plan to get there. While coaches certainly can and should help the team manage their time and timeline, exceptional teams are able to manage their time wisely by themselves.
The video linked above breaks project management into 5 steps or phases:
1. Create the Project Plan - Create a project charter and use an outline or a template if available.
2. Breakdown deliverables - what are the primary goals your team wants to accomplish.
3. Determine dependencies, critical paths, issues, risks, and resources
4. Create a timeline - when do the deliverables need to be accomplished?
5. Assign resources - figure out how to give people tasks and the means to accomplish them.
Project Plan
The project plan consists of
1. Name of the team and its mission or purpose.
2. The core values of the team
3. How the team will treat each other and interact with each other.
4. The goals (i.e. deliverables) of the team.
5. Dependencies for each of the goals.
6. Risks for each of the goals.
7. Timeline for tasks to accomplish the goals.
8. Resources needed to accomplish tasks.
9. Assigned resources to the tasks
1. Name the team and create the mission statement.
Come up with something fun for a name! Then, figure out why you are doing whatever it is you think you'll do.
Example:
As a world-class FLL robotics team, the three-fold mission of the Bowmar Builders is to develop interest and competency in STEM fields, including technical communication, for the team members, promote interest in and desire to study STEM fields for the students at Bowmar Elementary School and in our community, and to promote, mentor, and assist other FLL teams.
2. The core values of the team
The central values of the team members are the glue that hold them together. They are also a key part of the competition. Examples include Discovery, Learning, Integration, Synergy, Think Win-Win, Coopertition, Mentoring, etc.
FLL as a whole has a set of Core Values. Your team can adopt any and all of these and add others as well.

3. Team Interactions
The interactions section is both physical interactions (where and when the team will meet) and social interactions. How will the team members show respect to each other? How will they handle disagreements? How does Gracious Professionalism and Coopertition come in to play? How will you honor the spirit of friendly competition? How will you learn together? How will you have fun?
4. Team Goals
What does the team want to accomplish? What is it you really want to do?
For example:
Goal #1: Develop competency in technical communication skills in the team members.
Goal #2: Develop team leadership skills and knowledge in the team members.
Goal #3: Successfully research and develop a world-class project.
Goal #4: Successfully develop a world-class robot, including programming and design.
Goal #5: Promote robotics and STEM activities at Bowmar Elementary and in our community.
Goal #6: Provide feedback, mentoring, and assistance to other FLL teams.
Goal #7: Have fun!
5. Develop dependencies. These include tasks and resources needed.
Example:
In order to achieve goal #1, develop competency in technical communication skills in the team members, we as a team will
1. Research and practice professional speaking skills
2. Research and practice professional presentation skills
3. Research and practice professional writing skills
This will include at-home research with team discussion of skills. We will incorporate the skills we learn into the development and execution of our presentations for Project, Core Values, and Robot Design. We will have two off-site meetings where we will practice public speaking skills. We will each write several blog entries on technical subjects related to FLL, our robot, our programs, our project, and our core values.
The resources needed to accomplish these tasks are:
1. An off-site meeting place
2. Access to on-line resources about professional speaking, presentation, and writing skills
3. A website where we can write and publish our articles
4. Access to internet-connected computers
Parts 6-9 to come!
Project management is an important concept to learn. In order to successfully manage their time, the team needs to know how to manage the project. The team needs goals and milestone, and a plan to get there. While coaches certainly can and should help the team manage their time and timeline, exceptional teams are able to manage their time wisely by themselves.
Project Management
Project management skills are critical to the success of a team. The members of the team need to know and use project management skills. Many of the concepts are going to be over the heads of the team members but as a coach you will need to refer back to these concepts over the course of the year. This is a short-short overview of project management.The video linked above breaks project management into 5 steps or phases:
1. Create the Project Plan - Create a project charter and use an outline or a template if available.
2. Breakdown deliverables - what are the primary goals your team wants to accomplish.
3. Determine dependencies, critical paths, issues, risks, and resources
4. Create a timeline - when do the deliverables need to be accomplished?
5. Assign resources - figure out how to give people tasks and the means to accomplish them.
Project Plan
The project plan consists of
1. Name of the team and its mission or purpose.
2. The core values of the team
3. How the team will treat each other and interact with each other.
4. The goals (i.e. deliverables) of the team.
5. Dependencies for each of the goals.
6. Risks for each of the goals.
7. Timeline for tasks to accomplish the goals.
8. Resources needed to accomplish tasks.
9. Assigned resources to the tasks
1. Name the team and create the mission statement.
Come up with something fun for a name! Then, figure out why you are doing whatever it is you think you'll do.
Example:
As a world-class FLL robotics team, the three-fold mission of the Bowmar Builders is to develop interest and competency in STEM fields, including technical communication, for the team members, promote interest in and desire to study STEM fields for the students at Bowmar Elementary School and in our community, and to promote, mentor, and assist other FLL teams.
2. The core values of the team
The central values of the team members are the glue that hold them together. They are also a key part of the competition. Examples include Discovery, Learning, Integration, Synergy, Think Win-Win, Coopertition, Mentoring, etc.
FLL as a whole has a set of Core Values. Your team can adopt any and all of these and add others as well.

3. Team Interactions
The interactions section is both physical interactions (where and when the team will meet) and social interactions. How will the team members show respect to each other? How will they handle disagreements? How does Gracious Professionalism and Coopertition come in to play? How will you honor the spirit of friendly competition? How will you learn together? How will you have fun?
4. Team Goals
What does the team want to accomplish? What is it you really want to do?
For example:
Goal #1: Develop competency in technical communication skills in the team members.
Goal #2: Develop team leadership skills and knowledge in the team members.
Goal #3: Successfully research and develop a world-class project.
Goal #4: Successfully develop a world-class robot, including programming and design.
Goal #5: Promote robotics and STEM activities at Bowmar Elementary and in our community.
Goal #6: Provide feedback, mentoring, and assistance to other FLL teams.
Goal #7: Have fun!
5. Develop dependencies. These include tasks and resources needed.
Example:
In order to achieve goal #1, develop competency in technical communication skills in the team members, we as a team will
1. Research and practice professional speaking skills
2. Research and practice professional presentation skills
3. Research and practice professional writing skills
This will include at-home research with team discussion of skills. We will incorporate the skills we learn into the development and execution of our presentations for Project, Core Values, and Robot Design. We will have two off-site meetings where we will practice public speaking skills. We will each write several blog entries on technical subjects related to FLL, our robot, our programs, our project, and our core values.
The resources needed to accomplish these tasks are:
1. An off-site meeting place
2. Access to on-line resources about professional speaking, presentation, and writing skills
3. A website where we can write and publish our articles
4. Access to internet-connected computers
Parts 6-9 to come!
TED Talks on Communication
Effective Communication
By Aaron ByrdEffective communication is at the heart of the project, robot design, and core values judging. The judges need to see and feel your team's passion and enthusiasm for their project, their robot, and their team. They need to know and understand why you chose the project and how your project changed your team, your school, and your community.
Here are a few TED talks that talk about public speaking and go over speaking skills. It will be helpful to have the students watch these videos, have a discussion on them, and pull out one or two key details that your team and team members want to apply.
TED's Secret to Great Public Speaking
How ideas and communicating ideas can change the world.
10 Ways to Have a Better Conversation
10 useful rules for improving people's interest in your topics and how you communicate with them.
The Secret Structure of Great Talks
Structure for creating contrast, interest, and motivation in a talk.
How to Speak so that People Want to Listen
Discusses seven deadly sins of speaking, four cornerstones for powerful speaking, and tools in the speaking toolbox. Includes vocal exercises.
Saturday, May 28, 2016
Good Reference Materials for Mechanical Design
One of the best ways to teach the team members mechanical principles is to demonstrate for them a variety of ideas and options. The goal is to have them have a hands-on time where they can learn mechanical principles. Once the team members demonstrate that they can construct the example mechanisms you should have them try to apply the principles to a new situation.
A good reference book that has many examples with instructions on how to build them is "The Lego Mindstorms EV3 Idea Book" by Yoshihito Isogawa. It is available on amazon.com.

A good reference book that has many examples with instructions on how to build them is "The Lego Mindstorms EV3 Idea Book" by Yoshihito Isogawa. It is available on amazon.com.

Follow That Line Algorithm
By Mateo B.
The FollowThatLine algorithm makes the robot follow the line for a certain number of rotations. It is a two-sensor line following algorithm.











Overview
The FollowThatLine algorithm makes the robot follow the line for a certain number of rotations. It is a two-sensor line following algorithm.

Robot Setup
The two color sensors need to be 1/2 block off of the mat. They need to be 1 block apart from each other. This lets them track both sides of the black and white line on the mat. The robot has the two color sensors plugged into ports 2 and 3, with the one in port 2 on the left. The drive motors are plugged into ports B and C.Outer Control Loop
The outer control loop repeats the logic until the exit condition is met. The exit condition is the number of rotations. The overall logic uses a state-based system where the wheels are just turned on rather than on for a specific time, degrees, or distance. The outer control loop determines when to be done. The wheels are not turned off at the end of the algorithm.Exit Condition
The exit condition is go until greater than or equal to a number of wheel rotations. The exit condition is hooked up to an input parameter. This makes it so when you add the myblock you type how far the robot goes. To make the parameter you add a numerical parameter when you make the myblock.
First Switch Block
The algorithm is controlled by two switch statements. The first switch block tests if sensor 3 (the right sensor) is less than or equal to a reflectance value of 50 (darker than half black and white). The options are true, meaning we have moved to too dark, or false, meaning that it is either ok or too white.
First Switch Block - True
If sensor 3 measures too dark then the robot has steered to the left and we want it to start steering to the right. This is done by adjusting the power to each wheel.
First Switch Block - False
If it is false we need to figure out if we need to steer right.
Inner Switch Block
In the inner switch block for the false value of the outer switch block, the robot tests sensor 2 (on the left) for a reflectance intensity less than or equal to 50. This will test to see if the robot has steered too far right.Inner Switch Block - True
If it is true steer left because the robot is to far to the right. You do this by adjusting the wheel power to B and C.
Inner Switch Block - False
If it is false then the robot is neither too far left nor too far right. The robot needs to steer forward by setting the wheel power to the same number.
Summary
The FollowThatLine algorithm uses two switch statement to determine if the robot needs to steer left, right, or go straight. The steering is done by adjusting power to the two drive wheels. The exit condition is a motor turning a desired number of revolutions. The key sensing mechanism is if the two color sensors are measuring a value of 50 or less, meaning too dark (over the black line.) The algorithm assumes that it starts somewhere close to being correctly over the line (the black line will be between the two sensors.)
Subscribe to:
Posts (Atom)